
Figure 1. Schematic illustration of the
realization of the CEP through the coordinate transformation
between the TRS and the CRS used in processing the observations
Discussion extracted from Newsletter 2 of the IAU Working group T5
Nicole Capitaine
Observatoire de Paris, 9 August 1999
1. General
presentation of the CEP
(N. Capitaine, A. Brzezinski, cf p 155-160, Proceedings
of the Journées1998)
Introduction
The coordinate transformation from the Terrestrial
Reference System (TRS) to the Celestial Reference System (CRS) makes use
of an intermediate pole to which refer precession and nutation. The present
pole of reference is the Celestial Ephemeris Pole (CEP) which is supposed
to be such that its motion both in space and within the Earth includes
only secular and long periodic motions (i.e. longer than one day). This
definition presents new difficulties due to the improvement of the accuracy
of the theory and observations as well as to the change in the strategy
of observations. Recent theories, at a microarsecond accuracy, includes
indeed diurnal and sub-diurnal components both in the TRS and the CRS,
some of them being of amplitudes larger than the current accuracy of the
estimated Earth Orientation Parameters (EOP). Moreover, new strategy of
observations provides estimation of these parameters with a sub-diurnal
temporal resolution. The pole has therefore to be re-defined in consistency
with this new situation (models, accuracy, observations) and the link of
this pole to the instantaneous pole of rotation (IPR) has to be clearly
specified.
The choice of the CEP
The theory of Earth rotation provides the solution
for a ``z axis'' which can be, according to the author, the axis of angular
momentum (Fedorov 1963, Kinoshita 1977), the axis of instantaneous rotation
(Woolard 1953), the axis of figure or the Tisserand axis for a non-rigid
Earth model (Wahr 1981). The transformation between theses axes are given
by the Oppolzer terms in the CRS or ``diurnal nutation'' in the TRS.
The
instantaneous pole of rotation (IPR) has been the pole of reference for
nutation during nearly one century, from the theory of Oppolzer (1886)
to the IAU-1980 theory of nutation (Seidelmann 1982). It was considered
at that time to be the most appropriate reference pole; the total forced
luni-solar motion of the celestial pole as observed through optical astrometry
was then arbitrarily divided into two parts : the celestial precession-nutation
of the IPR and the ``diurnal polar motion'' (of the IPR), which was called
``diurnal (or dynamical) variation of latitude'' or ``diurnal nutation''.
In the IAU-1964 theory of nutation (Woolard 1953), the reference pole was
the IPR, but the geometrical and kinematical relations of the axis of rotation
to the other axes considered in the theory of the rigid Earth were largely
considered. The ``Oppolzer terms'' from the axis of angular momentum to
the other axes were computed providing the forced periodic terms for the
axis of figure and axis of rotation and consequently the nutations for
the different poles.
The
choice of the axis of rotation has been questioned by Jeffreys (1963) and
Atkinson (1973, 1975) and the IPR has been shown, during the discussion
preparing the choice of a new theory of nutation from 1970 to 1980, to
be not actually observable through the available observations at that time
(optical astrometry, satellite observations) (Kinoshita et al. 1979).
Thus, in the IAU-1980 theory of nutation (Seidelmann
1982), a new reference pole has been adopted, the Celestial Ephemeris Pole
(CEP) to which the numerical values of the conventional model refers; these
numerical values have been computed such as they include the forced diurnal
polar motion, which thus has no more to be considered as a separate part
of the forced motion of the pole. A tentative conceptual definition of
the CEP has been given as the ``pole that has no nearly-diurnal motion
with respect to a space-fixed coordinate system or an Earth-fixed coordinate
system'', or ``the center of the quasi-circular paths of the stars in the
sky''. The geophysical meaning corresponding to such a property was ``the
pole of the axis of figure for the mean surface of a model of Earth in
which the free motion has zero amplitude''. Such a concept is that used
by Wahr (1981) for its B-axis in the theory of rotation of a non-rigid
Earth defined as the ``axis of figure for the Tisserand mean outer surface''.
This conceptual definition of the CEP was rather confusing and the significance
of the change from the instantaneous pole of rotation to the CEP has been
largely discussed (Capitaine et al. 1985, Capitaine 1986). However, the
use of the CEP does clarify the consideration of the predictable part of
the motion of the celestial pole as considering the whole long-period part
of this motion in the CRS as being the celestial motion of the CEP. Its
realization is really closer to the actually ``observed pole'' than the
IPR.
Current realization of the CEP
At the time of the adoption of the IAU-1980 theory
of nutation, the CEP was realized by the IAU conventional models for precession
(IAU-1976 precession) and nutation (IAU-1980 nutation), whichever was the
technique used for the estimation of the EOP. The CEP was supposed to be
such that it has no diurnal or quasi-diurnal motions both in space and
within the Earth; however, the imperfections due to the conventional models
for precession and nutation gave rise to retrograde diurnal terms in the
TRS.
Since
1980, there have been much change in processing observations of EOP and
large improvement in the accuracy of the EOP estimates. The IAU conventional
models, whereas much improved with respect to the previous ones, appeared
to present deficiencies w.r.t. VLBI and LLR observations and to be therefore
inadequate for highly accurate observations. Consequently, the VLBI observations
provide on a regular basis, since 1980, the celestial pole offsets as observed
24h-estimates of the corrections to the conventional model. Such a procedure
gives a position of the celestial pole with a better accuracy (0.1 mas
in 1998), but it results in a change in the realization of the CEP and
even in its definition. In such a realization, there is indeed no retrograde
diurnal polar motion in the TRS and every diurnal prograde motion is absorbed
in the residuals.
More recently,
an interim precession-nutation model has been provided (Herring 1995) in
the IERS Conventions 1996 (McCarthy 1996) that matches the observations
with uncertainties of +/- 1 mas and therefore can be considered as a more
accurate realization of the CEP than the IAU conventional model, but not
as accurate as that provided by the use of the celestial pole offsets.
In
fact, the definition of the CEP depends on the convention retained for
the intermediate reference frame (origin on the equator, intermediate pole)
in the transformation between the TRS and the CRS which is used in processing
the observations.
Figure 1. Schematic illustration of the
realization of the CEP through the coordinate transformation
between the TRS and the CRS used in processing the observations
Using a coordinate transformation expressed through
the pole coordinates xp yp , the celestial pole coordinates
X and Y (Capitaine 1990), and the stellar angle theta,
the CEP can be defined as (Brzezinski & Capitaine
1995) (see Fig. 1):
- the pole (of celestial pole coordinates Xm,
Ym as realized by the conventional model for precession-nutation
as it is defined in the IAU-1980 nutation; it corresponds to the IAU 1980
definition of the CEP,
-
the pole (of celestial pole coordinates X', Y') as realized by the IERS
1996 precession-nutation; it corresponds to the pole as provided by the
various techniques which estimate the EOP within the IERS Conventions but
without using the celestial pole offsets,
-
the pole (of celestial pole coordinates X', Y') as realized through the
conventional model for precession-nutation corrected for the celestial
pole offsets estimated from observations; X', Y' are such that they include
the whole long-period motion in the CRS (i.e. there is no retrograde diurnal
motion of the pole in the TRS); it corresponds to the pole as realized
through current VLBI one-day EOP estimates.
The total perturbation to be determined from observations
which includes geophysical effects as well as deficiencies of the model,
is the displacement of the pole axis, T, of the TRS from the pole axis,
C', of the CRS' (as realized by an improved precession/nutation). It can
be expressed, as converted into complex notation p=xp-iyp,
P= X+i Y, as (Brzezinski & Capitaine 1993):
pt= p - P e^(-i*theta) (1)
As the coordinate transformation between CRS and
TRS is expressed by five parameters, of which only three are independent,
there is a full degeneracy between polar motion p and nutation P in (1).
For any unambiguous definition of the CEP, it is
thus necessary to introduce an additional constraint defining which part
of the residual motion is considered as polar motion (p) or nutation (P).
In the current estimation of the EOP, the separation between the two parts
are different according to the observing technique, processing of data
and time resolution of the EOP estimates.
Moreover,
it must be pointed out that any separation becomes unclear for the sub-daily
determination of the EOP (daily 1-hour estimate) which may justify to refer
in such a case to the IPR as done by Bolotin et al (1997) for the analysis
of an intensive VLBI campaign or to use a special procedure in processing
the observations.
Reconsidering the definition of the CEP
Several
reasons require to reconsider the definition of the CEP in order to provide
a more accurate realization of the pole of reference :
-
A new International Celestial Reference System, ICRS, realized by the direction
of extragalactic radiosources has been adopted starting 1 January 1998
(Ma et al. 1998), in place of the FK5 which was based on positions and
proper motions of stars. This provides a quasi-ideal CRS to measure the
celestial motion of the CEP, but consequently requires a most accurate
definition of this pole.
-
Improvements in the models have been recently achieved for precession-nutation
and for diurnal and sub-diurnal polar motion. For precession and nutation,
the results have been largely discussed within the IAU/IUGG WG on ``Nutation
for a non-rigid Earth Nutation theory'' (Dehant 1999). This can lead to
the theoretical realization of the pole of reference in the CRS at a 10
microarsecond level, but the correponding definition of the CEP should
then be given at the same order of accuracy. However, the most recent series
of nutation includes diurnal and semi-diurnal nutations in space (Bretagnon
et al. 1997) with amplitudes of the order of ten microarseconds and recent
models for polar motion also include diurnal and semi-diurnal variations
with amplitudes of the order of one hundred microarseconds (Herring &
Dong 1994) within the Earth due to oceanic tides. Therefore, the definition
of the CEP has now to clearly specify how to consider these high frequency
parts of amplitudes of the order of 10 microarseconds of the motion in
the TRS and the CRS.
-
Recent changes have appeared in the strategy of observations. The sub-daily
determinations of the EOP, with a level of accuracy of the order of 1 mas
make less clear the distinction between high-frequency polar motion which
appears in the terrestrial coordinates of the CEP and nutation which appears
in the celestial pole offset. A special procedure has to be used in the
processing of the data in order that the definition of the CEP is as accurate
as the achievable accuracy of the observed motions of the pole.
The
concept corresponding to the CEP is not clear and does not specify how
to consider the high frequency part of the motion in the TRS and in the
CRS. Consequently, the definition cannot easily be extended to the most
recent models and observations. A new definition of the CEP has therefore
to be given in order to be in agreement with modern models and observations.
The requirements for such a modern defintion are the following :
(1)
not to introduce any inaccuracy in the results,
(2)
to allow the data to provide the best astronomical and geophysical parameters,
(3)
to be based on clear concepts in consistency with the parameters used in
the models and with the parameters actually estimated by observations.
2. Programme
of the special session "Concept, definition and observations
of the Celestial Ephemeris Pole"
Journées 1998 "Systèmes
de référence spatio-temporels", Paris, 21-23 September
1998
(conveners : N. Capitaine and
A. Brzezinski)
Introductory papers, oral communications
and posters
N. Capitaine, A. Brzezinski : Introduction to the
session. Definition and observation of the pole at a microarcsecond accuracy
S. Mathews: Proposal for a new conceptual definition
of the Celestial Ephemeris Pole and procedure for realization of the pole
P. Bretagnon : Diurnal and sub-diurnal nutations
for a rigid Earth
A. Brzezinski, S. Petrov : Observational evidence
of the free core nutation and its geophysical excitation
Ch. Bizouard, S. Loyer, O.Titov : Diurnal and subdiurnal
terms of geophysical origin in the pole motion
M. Folgeira, J. Souchay : The diurnal and sub-diurnal
nutations calculated by different theories of rigid Earth rotation
B. Richter : Relation between precession/nutation
and polar motion derived by a synthetic approach
Discussion: Present and future of the CEP
3. Contributions
to the discussion "Present and Future of the CEP"
Journées 1998 "Systèmes
de référence spatio-temporels", Paris, 21-23 September
1998
I) COMMENTS ON THE DEFINITION AND DETERMINATION OF THE CEP by Ya. Yatskiv
Definition of the CEP depends on the observational
technique used for determination of the Earth's rotation and has to be
conventional.
In the 80-ies, this technique provides the determination
of polar motion and nutation from observation with sampling interval Dt
=1day of which the corresponding Nyquist frequency is sN=W/2D
t = 0.5 W (W being
the frequency of Earth rotation).
So, it was useful to specify polar motion (pc) and
nutation (nc) by their frequency ranges :
- 0.5 W < s < 0.5 W
for pc
in TRS (A)
- 1.5 W < s < - 0.5 W
for nc
It should be mentioned that from observations, one could determine the total displacement between the poles of TRF and CRF,
i.e. : e = pc- nc
The specification (A) means that nearly diurnal
polar motion (retrograde) is nutation. This was justified by relation of
amplitudes for this free mode : a n / a p =
430.
In 90-ies, diurnal variations of pc in
TRF and nc in CRF were found. It means that there is a wide
band spectrum of pc and nc:
pc |______|______|______|______|______|______|
(in TRF)
-3W
-2W -1W
0 1W
2W
3W
nc |______|______|______|______|______|______|
(in CRF)
-2W
-1W
0 1W
2W
3W 4W
How to split e into pc and nc is a conventional problem.
One of very simple proposal is to compute the model of nutations for external gravitational forces only for axial-symmetrical Earth (not including terms from gravity terms S31, C31, S41, C41, etc.). It could be called astronomical gravitational nutation for rotational symmetric Earth model.
All other effects (diurnal and subdiurnal in nutations), one could consider as polar motion. Note that diurnal and semi-diurnal variations in nutation is very small, so it could not affect the polar motion determination.
I suggest to preserve the name of ephemeris pole to stress that position of this pole could be calculated and predicted from theory.
II) CONTRIBUTION TO THE DISCUSSION ON THE CEP by J. Vondrak
We have two sources of torques acting on the rotating Earth :
a) external, due to the Moon, Sun and planets (mostly predictable and long-periodic in celestial reference frame),
b) geophysical, due to the transfer of mass within the Earth and its nearest vicinity (mostly unpredictable and long-periodic in terrestrial reference frame).
The observations give the total orientation of the Earth in space (i.e., a sum of polar motion and precession-nutation). The CEP is an additional auxiliary axis that separate these two effects; it can be defined quite arbitrarily. In principle, there are two different approaches (concepts) possible to do it :
1. Definition of CEP should contain only the predictable part of precession-nutation. In other words, only the terms excited by external torques are to be taken into account, the terms of geophysical origin are interpreted as polar motion.
2. Precession-nutation on one side and polar motion on the other one should be observationally separable one from the other, independently of the adopted Earth model. This concept requires that different frequency windows (with no overlapping) are reserved for precession-nutation and polar motion.
In 1980, when the concept of CEP was adopted, there seemed to be no contradiction between these two different concepts; the definition as described by Seidelmann et al. was an attempt to reconcile them, on the level of observational accuracy of that epoch.
Now the situation is different: with today's accuracy of observations and progress in theory, there are overlaps of external and geophysical torques in the same frequency regions. Therefore I am convinced that we should select only one of the above mentioned concepts (without advocating any of them). We should not mix them togeteher, so that we have clear definition, well understable by the users and leading to no confusions that we are facing now.
III) CONTRIBUTION TO THE DISCUSSION CONCERNING THE CEP by A. Brzenzinski
Let us consider the following 3 points at the celestial sphere: C', representing direction of the celestial z-axis (i.e. z-axis of the ICRF) after applying the conventional precession/nutation model; T, representing direction of the terrestrial z-axis (i.e. z-axis of the ITRF) in space; Ce, the Celestial Ephemeris Pole (CEP) representing an intermediate reference direction between C' and T. The motion of Ce relative to C' is called nutation while the motion of Ce relative to T is called polar motion.
Remark 1 : From the point of view
of the transformation ICRF/ITRF as well as of geophysical interpretation
of Earth rotation, the only quantity of interest is a total perturbation
of the terrestrial
z-axis in space, that is the vector C'T. Hence, any
choice of the CEP is only a matter of the current observational practice
and the adopted conventions.
Remark 2 : With exception of the cases Ce=C' and Ce=T, there are 4 parameters describing the vector C'T (2 for polar motion and 2 for nutation) while only 2 parameters are necessary. There is a full degeneracy between the polar motion and nutation parameters; see (Brzezinski & Capitaine, 1993; 1995) for details. This redundancy of the Earth orientation parameters (EOP) should be removed by imposing additional constraint which defines how much of the vector C'T is labelled as polar motion and how much as nutation.
Let us describe some possible choices for the CEP :
1. Dynamical approach : Ce =C'.
Nutation means only the astronomical nutation in
this case, as expressed by the conventional model, while the whole perturbation
C'T, including purely geophysical effects, is treated as polar motion.
This is the so-called polar motion gauge in
the terminology of Eubanks (1993). One advantage of this approach is the
conceptual clarity. Note, however, that the Free Core Nutation (FCN)
appears in this case as a nearly diurnal retrograde polar motion, hence
regular sub-diurnal measurements are necessary for monitoring this important
signal (see Remark 3 below).
2. Frequency domain decomposition.
It is assumed that all perturbations of the vector
C'T which are slow in space are treated as nutation while these variations
which are slow with respect to the Earth are polar motions. This decomposition,
corresponding to the definition of the CEP given by Seidelmann (1982),
is routinely realized by the VLBI technique since about 2 decades. Such
an approach is also convenient for geophysical interpretation as argued
by Brzezinski & Capitaine (1993; 1995), but becomes unclear in the
case of sub-diurnal observations because it is not specified how to treat
these perturbations which are fast both in space and with respect to the
Earth (e.g. diurnal prograde or semidiurnal variations). One possible parameterization
for the last case is proposed in this discussion by Matthews.
Remark 3 : The FCN oscillation (Brzezinski
& Petrov, this issue which has been observed since 1984 by VLBI, is
extremely important from the point of view of geophysical interpretation
of the EOP for the following reasons:
- it can be used to estimate the FCN parameters (the
period of resonance T, the quality factor Q and the mean power of oscillation
P) which are all of great geophysical interest;
- from the time domain comparison of the FCN signal
with geophysical estimates of the excitation function, it is possible to
constrain some parameters of the global atmospheric/oceanic circulation
models.
For such investigations the length of the available
FCN signal is a crucial factor, therefore any change in the definition
of the CEP or, more generally, in the parameterization of Earth rotation,
should be such that the monitoring of the FCN oscillation remains continuing
in a homogeneous way.
IV) COMMENTS ON THE RE-DEFINITION OF THE CELESTIAL EPHEMERIS POLE by D.D. McCarthy
1. Current IERS Processing
Currently the IERS requests contributors of Earth
orientation data to specify whether they have accounted for diurnal/subdiurnal
variations in their analyses. The Central Bureau and the Sub-bureau for
Rapid Service and Predictions then combine the data with all diurnal/sub-
diurnal variations removed to produce daily estimates of the Earth orientation
parameters. IERS Gazette 13 provides directions regarding the proper procedure
to be used to interpolate the data and include the diurnal/subdiurnal variations.
2. Background of the CEP
When the currently official definition of the CEP
was formulated it was decided that the CEP should in fact refer to a pole
which did not move diurnally in space or with respect to the Earth's crust.
The word "ephemeris" was chosen to emphasize that the pole was
in fact specified by the "ephemeris" provided by the expressions
and constants of the IAU 1980 Nutation model.
3. The Need for a Re-definition of the CEP
It is important that the CEP be re-defined to meet
the current situation. At the time the current definition was formulated
diurnal/subdiurnal variations were considered to be insignificant. The
precision with which current observations are available make it necessary
to refine the definition to take these variations into account. In fact
the current IERS procedure does not agree with the current definition.
At this time, when the IAU considering a new precession/nutation model,
the definition of the CEP must be clarified so that the appropriate model
can be formulated.
4. Considerations for a New Definition
Among the points to be considered in the re- definition
of the CEP should be listed the desirability to make sure that the pole
does not have large motions with respect to the ITRF. The majority of users
of Earth orientation parameters want to be sure that the reference pole
does not have extraneous motions due to the definition. It is also important
that the definition not be dependent on any technique. The definition should
be sufficiently general to include observations from any observational
technique.
5. Euler Angles
The use of Euler angles may indeed be the most desirable
means of providing the data necessary to transform between the terrestrial
and celestial reference systems. The definition of Universal Time in such
a formulation may be problematical but this should not be a major consideration
since the purpose of the Earth Orientation parameters is chiefly to provide
the transformations between the celestial and terrestrial reference systems
and not to provide time.
6. Future
The IAU Working Group on Reference Systems needs
to consider carefully and expeditiously the definition of the CEP. While
the Euler angle representation may be the most desirable, sufficient work
to implement the formulation practically has not yet been done. The proposal
to base the definition on a division of the frequency spectrum of Earth
orientation is attractive and
should be considered.
V) A NEW CONCEPTUAL DEFINITION OF THE CEP by P.M. Mathews
To be complete, the conceptual definition of the
CEP should include a characterization of the high frequency parts of its
motion in both the CRS and the TRS. It is proposed (see p 161 of the Proceedings
of the Journées 1998) that the CEP be defined to be such that the
motion of the CEP in the CRS includes all spectral components that are
either of low frequency or are retrograde with respect to the CRS, and
its motion in the TRS includes all components that are either of low frequency
or are prograde with respect to the TRS. Put differently, all spectral
components that are of frequencies less than 1/2 cpsd in the CRS (or equivalently,
less than -1/2 cpsd in the TRS) are to be included in the celestial motion
of the CEP, and all frequencies greater than 1/2 cpsd in the CRS (-1/2
cpsd in the TRS) are to be included in its terrestrial motion.
As a concomitant of such a definition, it would be
necessary to specify or suggest necessary modifications of the procedures
currently in use for the processing of space-geodetic data, in order to
make it possible to extract the high frequency content of the celestial
and terrestrial motions of the CEP from the volume of space geodetic data
already available and from data being gathered following current practices.
Figure 2: Realization of the CEP : Nutation
and polar motion expressed in terms
of a set of functions including contributions of high frequency and low
frequency motions
VI) AN USEFUL GRAPHICAL REPRESENTATION OF THE PERIODIC EARTH'S ROTATION MOTIONS by S. Loyer
The recent sub-diurnal (up to 1 hour resolution) determinations of the Earth Orientation Parameters (EOP) raise some new problems concerning the definition of the intermediate axis used by the astronomical community to split the observed Earth's orientation variations into celestial and terrestrial parts. The lack of a clear definition appears particularly critical in the diurnal and sub-diurnal bands of the spectrum of the variations.
 |
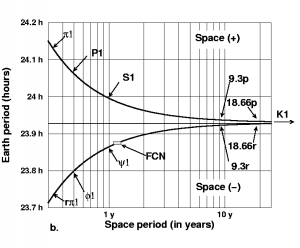 |
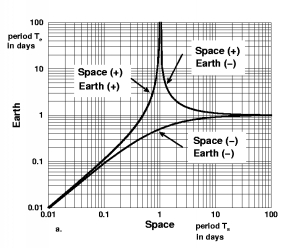
Figure 3: Link between the celestial and terrestrial periods of a rotational motion (right part: zoom on the right part of the Figure)
Figure 3 put all together in
the same quadrant the three hyperbolic parts of the curve defined by the
relation Te = TW TS
/ (TW-TS), (where TW
= 1 sidereal day), taking into account all the possible values of
TS (corresponding to the spatial-frequency sS)
and Te (corresponding to the Earth-frequency se).
The retrograde (resp. prograde) motions, that correspond to a negative
(resp. positive) value of the period, are marked on the graph
with the - sign (resp. + sign). This provides
a synthetic representation of the different Earth's motions of rotation
as viewed from Earth or space which can help to choose a future definition.
For example, the choice to include
the new diurnal and sub-diurnal motions into the terrestrial parameters
can be represented as a vertical line at TS=2 days, such that
all the sub-diurnal motions as the prograde diurnal motions are expressed
in the terrestrial frame. This conventional choice gives a preference to
the terrestrial point of view for diurnal and sub-diurnal motions.
VII) COMMENTS ON THE EOP PARAMETERS by M. Rothacher
Subdaily estimations of EOP will be available on a regular basis very soon and the estimation of five unknown every 2 hours is not possible; a constraint to apply is that there is no retrograde diurnal polar motion. A proposal can be to estimate only three parameters which could be the Euler's angles including both polar motion and nutation.
VIII) REMARKS ABOUT THE OBSERVATIONS AND THE EOP PARAMETERS by H. Schuh
1. The quality of the nutation series observed by VLBI is very poor before January 1984 because of the geometry of the VLBI network in these early days. That's why we (at DGFI) usually don't use these data for our nutation analyses.
2. The statement by Markus Rothacher to use three
Earth orientation angles instead of five parameters had been proposed by
several other colleagues in the past, too.
This idea seems to be good but its realization will
show that many additional problems will occur and that's
why it finally would complicate the situation and decrease the quality
of the results.
The use of three parameters will cause very large
diurnal variations because what could be expressed so far very elegantly
by two nutation coefficients per 24 hours (in the celestial reference system)
will need a very high resolution of the diurnal motion (in the terrestrial
reference system). Moreover, it will not give any benefit to those who
analyse and interpret the data because later on the two effects (nutation,
polar motion) which have different causes have to be split up anyway.
Atkinson, R.d'E., 1973, ``On the dynamical variation
of latitude'', AJ 78, 147.
Atkinson, R.d'E., 1975, ``On the Earth's axes of
rotation and figure'', MNRAS, 171, 381.
Bolotin, S., Bizouard, C., Capitaine N., 1997, ``High
frequency variations of the Earth's instantaneous angular velocity vector
:determination from VLBI analysis'', A&A 317, 601-609.
Bretagnon P., Rocher P., and Simon J.-L., 1997, ``Theory
of the rotation of the rigid Earth.", A&A 319, 305-317.
Brzezinski A. and Capitaine N., 1993, ``The use of
the precise observations of the Celestial Ephemeris Pole in the analysis
of geophysical excitation of earth rotation", JGR 98, No. B4, 6667-6675.
Brzezinski A. and Capitaine N., 1995, ``Celestial
Ephemeris Pole (definition, observability and determinations)'', in Proc.
Journées Systèmes de Référence Spatio-Temporels
1995, N. Capitaine, B. Kolaczek and S. Débarbat, eds, pp 53-60.
Capitaine, N., 1986, ``The Earth rotation parameters
: conceptual and conventional definitions'', A&A 162, 323-329.
Capitaine, N., 1990, ``The celestial pole coordinates'',
Celest. Mech. Dyn. Astr.48, 127-143. Capitaine,
N., Williams, J.G., Seidelmann, P. K. 1985, "Clarifications concerning
the definition and determination of the Celestial Ephemeris Pole'', A&A
146, 381-383.
Dehant, V., 1999, Report of the WG ``Non-rigid Earth
nutation theory'', in Proc. Journées Systèmes de Référence
Spatio-Temporels 1998, N. Capitaine ed, Observatoire de Paris, p 73-78.
Eubanks T. M. (1993). Variations in the orientation
of the Earth, in: Contributions of Space Geodesy to Geodynamics: Earth
Dynamics, Geodynamics Series, 24, edited by D.E. Smith and D.L. Turcotte,
1-54, American Geophysical Union, Washington,
Fedorov, E.P., 1963, ``Nutation and forced motion
of the Earth's pole", Pergamon Press, Ltd, Oxford.
Herring T.A., 1995, ``A priori model for the reduction
of the nutation observations.", Highlights of Astronomy, Vol. 10,
pp 222-227.
Herring, T.A. and D. Dong, 1994, ``Measurement of
diurnal and semi- diurnal rotational variations and tidal parameters of
Earth", JGR 99, 18051-18071.
Jeffreys, H., 1963, Forward (p xi) to ``Nutation
and forced motion of the Earth's pole", by E.P. Fedorov, Pergamon
Press, Ltd.
Kinoshita H., 1977, ``Theory of the rotation of the
rigid Earth.", Celest. Mech. 15, 277-326.
Kinoshita H., Nakajima K., Kubo Y., Nakagawa I.,
Sasao T. and Yokohama K., 1979, ``Note on nutation in ephemerides'', Publ.
Int. Lat. Obs. Mizusawa, 12, 71-108.
Ma, C.,Arias, E.F., Eubaks, M. Fey, A.L., Gontier,
A.-M., Jacobs, C.S., Archninal, B.A., Charlot, P., 1998, ``The International
Celestial Reference Frame as realized by Very Long Baseline Interferometry'',
AJ 116, 516-546.
McCarthy D.D., 1996, ``IERS Conventions'', IERS Technical
Note 21, Observatoire de Paris.
Oppolzer, T., 1886, ``Traité de détermination
des orbites'', Gauthiers-Villars, Paris.
Seidelmann, P. K., 1982, 1980 IAU Theory of Nutation:
the final report of the IAU working group on nutation, Celest. Mech. ,
27, 79-106.
Wahr J.M., 1981, ``The forced nutations of an elliptical,
rotating, elastic and oceanless Earth.", GJRAS, 64, 705-727.
Woolard, E. W., 1953, ``Theory of the rotation of
the Earth around its center of mass'', Astr. Pap. Amer. Ephem. Naut. Almanach
XV, I, 1-165.
5. Summary of the main issues of the discussion on the new definition of the CEP
The discussion has confirmed that a new definition
of the CEP is necessary.
Several proposals have been presented in order to
take into account the high frequency parts of the motion of the pole both
in the CRS and the TRS. However, further discussions are necessary, especially
with people involved in the processing of VLBI data, to choose the best
way of considering the motions in the softwares.
This discussion will be continued within the subgroup T5 of the "ICRS" IAU Working Group and especially by the consideration of the questions in section 6.
It must be recalled that this discussion is based upon the 5 EOP representation (motions of the pole in the CRS and in the TRS + UT1). The comparison between other parameters representation (for example 3 angles) will be an other issue which will be considered inthe next Newsletter.
A summary of the main issues of the discussion is given below.
5.1 Current realization of the pole
The current realization of the pole uses the CEP
as an intermediary pole separating the motion into:
- celestial motion of the CEP = long period terms
in the CRS
- terrestrial motion of the CEP = long period terms
in the TRS.
At the time of the adoption of the CEP, due to
the required accuracy, the convention was such that:
- long periodic terms in the CRS = nutation,
- long periodic terms in the TRS = polar motion,
long periodic terms meaning periods > 2days
, i.e -1/2 < s < +1/2 (with the frequency, s, in c.p.d.), except
for the FCN which can be considered in the TRS.
These periodic terms can be represented as follows (with frequency s, such taht : sTRS = sCRS- 1) :
as viewed in the TRS |_______|_______|_______|_______|
-3/2 -1
-1/2 0
+1/2
celestial motion I terrestrial motion
as viewed in the CRS
|_______|_______|_______|_______|
-1/2
0 +1/2
1 +3/2
The VLBI estimates of the "celestial pole offsets" on a daily basis provide a strict realization of this separation. But, other techniques, not estimating the celestial pole offsets, do not provide the same pole and nothing is specified for the high frequency motion both in the CRS and TRS.
5.2 Extension of the conceptual definition of the CEP
In order to take account of :
- the diurnal and subdiurnal motions of the pole
in the TRS at the microarsecond level,
- the prograde diurnal and semi-diurnal nutations
in the CRS at the microarsecond level,
and to be not dependent on the techniques and strategy
of observations,
two approaches are possible for giving a new conceptual definition of the CEP:
A) Dynamical approach : separation according to the physical cause
A.1. - the whole predictable part of the motion
in the CRS, including diurnal and subdiurnal terms, is considered as
the celestial motion of the CEP,
- other part of the motion of the pole is
considered as polar motion of the CEP,
A.2. - the whole predictable part of the motion
in the CRS, including diurnal and subdiurnal terms, is considered as
the celestial motion of the CEP,
- the whole predictable part of the motion in
the TRS, including diurnal and subdiurnal terms, is considered as the
terrestrial motion of the CEP. This corresponds to the present IERS
procedure (see 3. IV).
A.3. - the long periodic part of the predictable
motion in the CRS is considered as the celestial motion of the
CEP,
- the other part of the motion of the pole
is considered as polar motion of the CEP.
This corresponds to the proposal 3. I).
B) Frequency approach separating the motion according to the frequency domain
B.1 Extension of the current definition of the
CEP such that :
- all the motions of frequency s< 1/2 in the CRS
are considered as celestial motion of the CEP,
- all the motions of frequency s> 3/2 in the CRS
are considered as terrestrial motion of the CEP.
Such a definition keeps the symmetry in the frequency band between polar motion and celestial motion of the CEP, which is very logical. It corresponds to proposal 3. V).
B.2 Extension of the current definition of the
CEP such that :
- all the motions of frequency existing in the CRS
for the precession/nutation model (long periodic motions as well as prograde
nearly-diurnal and semi-diurnal terms) are considered as celestial motion
of the CEP,
- all the motions of frequency existing in the TRS
for the diurnal and sub-diurnal motion of the pole are considered as terrestrial
motion of the CEP.
This takes into account the motion according to its
frequencies of the predictable motion both in the CRS and TRS.
5.3 Extension of the realization of the CEP
The conceptual definition of the CEP can be extended according to one of the options proposed in the previous section. However, it must be stressed that, whichever is the chosen conceptual definition, the separation into frequency domain becomes unclear for subdiurnal observations.
This is therefore not sufficient for realizing the CEP in an unambiguous manner and the realized CEP actually depends on the procedure which is used in processing the data. It is necessary to choose a procedure in order to make possible to extract the high frequency signal both in the CRS and the TRS.
Several procedures are possible:
C.1: to use the proposal 3. V) which allows to extract the high frequency signal in the processing of the observations, following the conceptual definition B.1.
C.2: to use the proposal 3. I), which put all the diurnal and sub-diurnal motions both in the CRS and the TRS, into estimated polar motion of the CEP which can be analyzed in a second step for providing the high frequency signal.
C.3: to process the observations in order to extract, in one step, all the diurnal and sub-diurnal motions in the CRS or the TRS in the estimated coordinates of the pole in the TRS .
C.4: to refer the motion of the pole, except the long-periodic precession and nutation, to the instantaneous axis of rotation whose kinematical properties are such that its motions in the TRS and CRS are linked by well-known kinematical relations. Such a procedure is based on the estimation of derivative of infinitesimal angles (Bolotin et al . 1997) in the coordinate transformation between CRS and TRS used in the processing of the observations.
6. Questions
to the sub-group T5
1. Do you agree that a new definition of the CEP is necessary ?
2. Which option do you support for a new conceptual
definition : dynamic approach (A1, A2 or A3) ?
or frequency approach (B1 or B2) ?
3. Which option do you support for a new realization of the CEP (C1, C2, C3 or C4) ?
4. Do you think that the use of one of these options can resolve the overlapping between terrestrial and celestial motions in the case of few hours estimates of the EOP ?
5. Do you think that such option can be implemented easily in the software for processing the data ?
6. Have you another suggestion which can be discussed
among the subgroup T5 ?
Answers to be sent to : capitain@danof.obspm.fr